第2题
阅读以下关于某四轴飞行器系统设计的说明,回答问题1至问题4。
【说明】
在某四轴飞行器系统设计中,利用惯性测量单元(IMU)、PID电机控制、2.4G无线遥控通信和高速空心直流电机驱动等技术来实现一个简易的嵌入式四轴飞行器方案。整个系统的设计包括飞控板和遥控板两部分,两者之间采用2.4G无线模块进行数据传输。飞控板采用高速单片机STM32作为处理器,采用含有三轴陀螺仪、三轴加速度计的运动传感器MPU6050作为惯性测量单元,通过2.4G无线模块和遥控板进行通信,最终根据PID控制算法以PWM方式驱动空心电机来控制目标。

图2-1为李工设计的系统总体框图。飞控板和遥控板的核心处理器都采用STM32F103。飞控系统的惯性测量单元采用MPU6050测量传感器,MPU6050使用IIC接口,时钟引脚SCL、数据引脚SDA和数据中断引脚分别接到STM32的对应管脚,图2-2为该部分原理图。遥控板采用STM32单片机进行设计,使用AD对摇杆模拟数据进行采集,采用NRF2401无线模块进行通信,图2-3为该部分原理图。

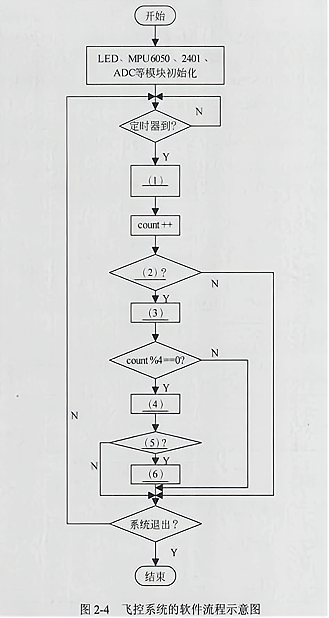
李工所设计的系统软件同样包含飞控板和遥控板两部分,飞控板软件的设计主要包括无线数据的接收、自身姿态的实时计算、电机PID增量的计算和PWM的电机驱动。遥控板主控制器软件通过ADC外设对摇杆数据进行采集,把采集到的数据通过2.4G无线通信模块发送至飞控板。图2-4为飞控系统的软件流程示意图。
【说明】
在某四轴飞行器系统设计中,利用惯性测量单元(IMU)、PID电机控制、2.4G无线遥控通信和高速空心直流电机驱动等技术来实现一个简易的嵌入式四轴飞行器方案。整个系统的设计包括飞控板和遥控板两部分,两者之间采用2.4G无线模块进行数据传输。飞控板采用高速单片机STM32作为处理器,采用含有三轴陀螺仪、三轴加速度计的运动传感器MPU6050作为惯性测量单元,通过2.4G无线模块和遥控板进行通信,最终根据PID控制算法以PWM方式驱动空心电机来控制目标。
图2-1为李工设计的系统总体框图。飞控板和遥控板的核心处理器都采用STM32F103。飞控系统的惯性测量单元采用MPU6050测量传感器,MPU6050使用IIC接口,时钟引脚SCL、数据引脚SDA和数据中断引脚分别接到STM32的对应管脚,图2-2为该部分原理图。遥控板采用STM32单片机进行设计,使用AD对摇杆模拟数据进行采集,采用NRF2401无线模块进行通信,图2-3为该部分原理图。
李工所设计的系统软件同样包含飞控板和遥控板两部分,飞控板软件的设计主要包括无线数据的接收、自身姿态的实时计算、电机PID增量的计算和PWM的电机驱动。遥控板主控制器软件通过ADC外设对摇杆数据进行采集,把采集到的数据通过2.4G无线通信模块发送至飞控板。图2-4为飞控系统的软件流程示意图。
【问题:2.1】由图2-1系统总体框图设计可知,飞控板和遥控板之间是用2.4G无线通信进行数据传输,各自主处理器和无线通信模块之间是SPI接口。同时,在飞控板上,处理器和惯性测量单元是通过IIC进行数据交互。以下关于SPI接口和IIC接口的描述中,正确的是:(1)、(2)、(3)、(4)。
A. SPI和IIC都是主从式通信方式
B. SPI的数据收发线是各自独立的,IIC也是同样
C. SPI和IIC的传输都不需要片选控制
D. IIC总线是一个多主机的总线,可以连接多于一个能控制总线的器件到总线
E. IIC总线包括标准模式,快速模式和高速模式,相互之间的传输速度差异并不大
F. 在原理设计中,到底采用SPI和IIC:哪种方式,需要依据外设芯片的接口而定
G. SPI是一种环形总线结构
H. 在IIC总线上,可以有多个从设备具有相同的IIC地址
A. SPI和IIC都是主从式通信方式
B. SPI的数据收发线是各自独立的,IIC也是同样
C. SPI和IIC的传输都不需要片选控制
D. IIC总线是一个多主机的总线,可以连接多于一个能控制总线的器件到总线
E. IIC总线包括标准模式,快速模式和高速模式,相互之间的传输速度差异并不大
F. 在原理设计中,到底采用SPI和IIC:哪种方式,需要依据外设芯片的接口而定
G. SPI是一种环形总线结构
H. 在IIC总线上,可以有多个从设备具有相同的IIC地址
【问题:2.2】(1) 图2-2飞控板部分原理图中,R4的作用是什么?
(2) 图2-3遥控板部分原理图中,C11、C12、C13、C14的作用是什么?
(2) 图2-3遥控板部分原理图中,C11、C12、C13、C14的作用是什么?
【问题:2.3】在STM32处理器的PWM使用过程中,最为关键的就是PWM的频率和占空比。PWM的频率依赖于PWM模块的参考时钟频率,自动装载寄存器ARR的值加1之后再乘以参考时钟频率即可得到PWM的频率。PWM的占空比是用捕获比较寄存器CCR和自动装载寄存器ARR获得的,PWM占空比=CCR/(ARR+1)。
假设当前主控板的STM32处理器PWM模块的参考时钟频率为1kHz,要将PWM模块的频率设置为100kHz,则ARR寄存器的值应设置为多少?如果此时占空比希望设置为20%,那么CCR寄存器的值应该设置为多少?
假设当前主控板的STM32处理器PWM模块的参考时钟频率为1kHz,要将PWM模块的频率设置为100kHz,则ARR寄存器的值应设置为多少?如果此时占空比希望设置为20%,那么CCR寄存器的值应该设置为多少?
【问题:2.4】飞控系统每0.5毫秒进行一次定时器的触发,每次中断都会检查一次无线模块数据的接收,以确保飞控系统控制信息的实时性。每2次中断(即1毫秒)读取一次MPU6050单元的数据,并进行算法处理。每4次中断(即2毫秒)通过计算当前飞控板系统的姿态,结合遥控端的目标姿态,根据两者的差值通过PID控制算法对各个电机进行调速控制。每200次中断(即100毫秒)采集一次电池电压,然后通过无线模块把电池电压发送给遥控板,以告知操作人员当前电压的大小。
图2-4为飞控系统软件实现的简要流程图,根据以上描述,请补全图2-4中的空(1)〜(6)处的内容。
图2-4为飞控系统软件实现的简要流程图,根据以上描述,请补全图2-4中的空(1)〜(6)处的内容。